Alternate notation for topology
We introduce some notation for the image and pre-image function. This will be useful as the definitions of topologies and continuity rely heavily on these functions.
Notation
Given some function \(f:X \to Y\) and some subset \(S\) of \(X\). We often use \(f(S)\) to denote the image of \(S\) under \(f\), i.e. the subset \(\{f(s) \,\vert\, s \in S\}\) of \(Y\). To distinguish between the original function and the image function, we will use \(Rf\) to denote the image function.
Similarly, if some function \(f:X \to Y\) was bijective, then we can define the inverse function \(f^{-1}: Y \to X\) where for any \(y \in Y\), \(f^{-1}(y)\) is the unique element in \(X\) such that \(f(f^{-1}(y)) = y\). For functions \(f\) that may or may not be bijective, we will use \(Lf\) to denote the pre-image function. I.e. given any subset \(S\) of \(Y\), let \(Lf(S)\) be the subset \(\{s \in X \,\vert\, f(s) \in S\}\) of \(X\).
To summarise,
\[\begin{align*} Rf: \mathcal{P}(X) \to \mathcal{P}(Y) &\text{ with } Rf(A) = \{ f(a) \,\vert\, a \in A\}, \\ Lf: \mathcal{P}(Y) \to \mathcal{P}(X) &\text{ with } Lf(B) = \{ a\in X \,\vert\, f(a) \in B\} \\ \end{align*}\]where \(\mathcal{P}(S)\) denotes the power set of \(S\).
Topology
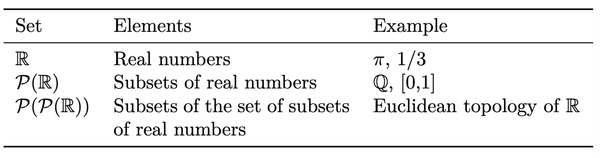
To define continuity we need a notion of topologies. Given some set \(X\), a topology \(\tau\) of \(X\) is a collection of subsets of \(X\) (called open sets) with some conditions. We can think of \(\tau\) as an element of the power set of the power set of \(X\), \(\mathcal{P}(\mathcal{P}(X))\). We use \((X, \tau_X)\) to denote the set \(X\) with the topology \(\tau_X\). As an overview, we have the following table.
Composition of images and pre-images
To define continuity, we will also compose image and pre-image functions. We will use \(RLf\) to denote \(R(Lf)\) and similarly \(LRf\) to denote \(L(Rf)\). Let’s consider a simple example.
Example: Let \(X=\{a\}\) and \(Y=\{b\}\). We will use \(\emptyset_X\) and \(\emptyset_Y\) to denote respectively the empty sets of \(X\) and \(Y\). We define \(f: X \to Y\) by \(f(a) = b\). The image function of \(f\) is
\[Rf: \mathcal{P}(X) \to \mathcal{P}(Y)\]defined by \(Rf(\emptyset_X) = \emptyset_Y\) and \(Rf(\{a\}) = \{b\}\) . As such the image function of the image function of \(f\) is
\[R(Rf): \mathcal{P}(\mathcal{P}(X)) \to \mathcal{P}(\mathcal{P}(Y))\]defined by
\[\begin{align*} RRf(\{\}) &= \{\}, \\ RRf(\{\emptyset_X\}) &= \{\emptyset_Y\}, \\ RRf(\{\{a\}\}) &= \{\{b\}\}, \\ RRf(\{\emptyset_X, \{a\}\}) &= \{\emptyset_Y, \{b\}\}. \end{align*}\]Continuity
The classical definition of continuity is that given some function \(f: (X, \tau_X) \to (Y, \tau_Y)\), \(f\) is continuous if for all \(U \in \tau_Y\), \(Lf(U) \in \tau_X\). Using the notation above, we can prove the following.
Claim: \(f: (X, \tau_X) \to (Y, \tau_Y)\) is continuous if and only if
\[RLf (\tau_Y) \subseteq \tau_X.\]Proof:
We can first check that this is well defined. Since \(Lf\) is a function from \(\mathcal{P}(Y)\) to \(\mathcal{P}(X)\), \(R(Lf)\) is indeed a function from \(\mathcal{P}(\mathcal{P}(Y))\) to \(\mathcal{P}(\mathcal{P}(X))\).
Now we will show the equivalence.
\[\begin{align*} &\quad RLf (\tau_Y) \subseteq \tau_X \\ &\iff \{Lf(U) \,\vert\, U \in \tau_Y \} \subseteq \tau_X & \text{Definition of } R \\ &\iff \forall U \in \tau_Y, Lf(U) \in \tau_X \\ &\iff f \text{ continuous} & \text{Definition of continuity} \end{align*}\]Q.E.D.
Composition of continuous functions
We can now succinctly prove that composition of continuous functions are continuous. Before that, we need some basic properties of images and pre-images which proofs will be left to the reader.
Lemma 1: Let \(f: X \to Y\) and let \(A \subseteq B \subseteq X\), \(S \subseteq T \subseteq Y\). Then
\[\begin{align*} Rf(A) &\subseteq Rf(B), \\ Lf(S) &\subseteq Lf(T). \\ \end{align*}\]Lemma 2: Let \(f: X \to Y\) and \(g: Y \to Z\), then
\[\begin{align*} R(g \circ f) &= Rg \circ Rf,\\ L(g \circ f) &= Lf \circ Lg. \\ \end{align*}\]Claim: Let \(f: (X, \tau_X) \to (Y,\tau_Y)\) and \(g: (Y, \tau_Y) \to (Z, \tau_Z)\). If \(f\) and \(g\) are continuous, then \(g \circ f\) is continuous.
Proof:
As \(g\) and \(f\) are continuous, we have
\[\begin{align*} RLg (\tau_Z) &\subseteq \tau_Y, \\ RLf(\tau_Y) &\subseteq \tau_X. \end{align*}\]So
\[\begin{align*} &RL(g \circ f)(\tau_Z) \\ &= R(Lf \circ Lg ) (\tau_Z) & \text{ lemma 2} \\ &= (RLf \circ RLg) (\tau_Z) & \text{ lemma 2} \\ &= RLf( RLg(\tau_Z)) \\ &\subseteq RLf(\tau_Y) & g \text{ continuous \& lemma 1} \\ &\subseteq \tau_X. & f \text{ continuous} \end{align*}\]Q.E.D.
Before we proceed any further, it’s helpful to consider the domains and codomains of the following compositions of pre-image and image functions. Let \(f: X \to Y\) be a function. Then the following functions have their corresponding domains and co-domains.
\[\begin{align*} Rf&: \mathcal{P}(X) \to \mathcal{P}(Y), \\ Lf&: \mathcal{P}(Y) \to \mathcal{P}(X), \\ RRf &: \mathcal{P}(\mathcal{P}(X)) \to \mathcal{P}(\mathcal{P}(Y)), \\ LRf &: \mathcal{P}(\mathcal{P}(Y)) \to \mathcal{P}(\mathcal{P}(X)), \\ RLf &: \mathcal{P}(\mathcal{P}(Y)) \to \mathcal{P}(\mathcal{P}(X)), \\ LLf &: \mathcal{P}(\mathcal{P}(X)) \to \mathcal{P}(\mathcal{P}(Y)). \\ \end{align*}\]Subspace and quotient topology
We will now make alternate definitions of the subspace topology and the quotient topology using our notation. These topologies have various nice properties. One could think of them as a way to generate topologies from existing topologies using injective / surjective functions. Explicitly, consider \(f:(X, \tau_X) \to (Y, \tau_Y)\). If \(f\) is injective then \(RLf(\tau_Y)\) is the subspace topology of \(X\). If \(f\) is surjective then \(LLf(\tau_X)\) is the quotient topology of \(Y\).
We will also describe these topologies as either the coarsest or the finest topology for which maps into or out of the space are continuous. However, we will stop short of describing the universal properties of these topologies.
Subspace topology
Definition: Let \(f: X \to (Y, \tau_Y)\) be an injective function. The topology \(\tau_X := RLf(\tau_Y)\) is called the subspace topology of \(X\).
Remark: We may not assume the injectivity of \(f\), however this weakens certain properties of the subspace topology.
We can show that our definition is equivalent to the classical definition.
Claim: Let \(f: X \to (Y, \tau_Y)\) be an injective function. Then \(S \in RLf(\tau_Y)\) if and only if there exists \(U \in \tau_Y\) such that \(Lf(U) = S\).
Proof:
Expand the definition of \(R\) in \(RLf(\tau_Y)\). We get \(RLf(\tau_Y) = \{Lf(U) \, \vert\, U \in \tau_Y\}\). Q.E.D.
Example: Let \(f: [0,1] \to \mathbb{R}\) be the inclusion map. Clearly \(f\) is injective. The subspace topology of \(X = [0,1]\) is classically defined to be \(\tau_X = \{[0,1] \cap U \, \vert \, U \in \tau_\mathbb{R}\} = \{Lf(U) \, \vert \, U \in \tau_\mathbb{R}\} = RLf(\tau_\mathbb{R})\).
It’s clear that \(f: (X, RLf(\tau_Y)) \to (Y, \tau_Y)\) is continuous from our discussion on continuity. It’s also clear that \(RLf(\tau_Y)\) is the coarsest topology on \(X\) such that \(f\) is continuous.
Quotient topology
Definition: Let \(f: (X,\tau_X) \to Y\) be a surjective function. The topology \(\tau_Y := LLf(\tau_X)\) is called the quotient topology of \(Y\).
Remark: There are some reasons why we would like \(f\) to be surjective.
We can show that it’s equivalent to the classical definition.
Claim: Let \(f: (X,\tau_X) \to Y\) be a surjective function. Then \(S \in LLf(\tau_X)\) if and only if \(Lf(S) \in \tau_X\).
Proof:
Expand the definition of the second \(L\) in \(LLf(\tau_X)\), we get \(LLf(\tau_X) = \{U \subseteq Y \, \vert \, Lf(U) \in \tau_X\}\). Q.E.D.
Example: Let \(f: \mathbb{R} \to S^1 \subseteq \mathbb{R}^2\) by \(t \to (\cos t, \sin t)\). This is clearly a surjective function. The quotient topology on \(S^1\) is now \(LLf(\tau_\mathbb{R}) = \{U \subseteq S^1 \, \vert \, Lf(U) \in \tau_\mathbb{R}\} = \{U \subseteq S^1 \, \vert \, \{x \in \mathbb{R} \, \vert \, f(x) \in U\} \in \tau_\mathbb{R}\}\) which is what we expect.
The continuity of \(f: (X, \tau_X) \to (Y, LLf(\tau_X))\) is immediate from the previous claim. We can however prove it without the claim. We would first need a lemma, the proof of which is left as an exercise.
Lemma 3: Let \(f: X \to Y\) and let \(A \subseteq X\), \(S \subseteq Y\). Then
\[\begin{align*} (Lf \circ Rf)(A) &\supseteq A, \\ (Rf \circ Lf)(S) &\subseteq S.\\ \end{align*}\]Claim: If \(f: (X, \tau_X) \to Y\) is surjective, then \(f: (X, \tau_X) \to (Y, LLf(\tau_X))\) is continuous.
Proof:
To show that \(f\) is continuous, we need to show \(RLf(LLf(\tau_X)) \subseteq \tau_X\). Now \(RLf(LLf(\tau_X)) = (R(Lf) \circ L(Lf))(\tau_X) \subseteq \tau_X\) by lemma 3 applied to \(Lf: \mathcal{P}(Y) \to \mathcal{P}(X).\) Q.E.D.
We can also prove that \(LLf(\tau_X)\) is the finest topology on \(Y\) such that \(f\) is continuous.
Claim: Let \(f: (X, \tau_X) \to (Y, \tau_Y)\) be surjective and continuous, then \(\tau_Y \subseteq LLf(\tau_X)\).
Proof:
From continuity of \(f\), we have \(RLf(\tau_Y) \subseteq \tau_X\). Applying \(LLf\) to both sides, we would obtain
\[(LLf \circ RLf) (\tau_Y) \subseteq LLf (\tau_X)\]by lemma 1.
We also know that \(\tau_Y \subseteq (L(Lf) \circ R(Lf))(\tau_Y)\) by lemma 3. Combining the two inclusions we obtain
\[\tau_Y \subseteq LLf (\tau_X).\]Q.E.D.
Closing remarks
One can check out an alternate arrow notation from “Lattices and Ordered Algebraic Structures” by T.S. Blyth. For more on topology, one can check out chapter 1 of the book “Topology: A Categorical Approach” by Tai-Danae Bradley et al.
Thanks to Isaac Li for comments and suggestions on notation.